純粹是因為之前有案子用到~~不好意思!
CSIM SLIM7 Series Servo-Stepping motor
型 號 SLIM3543


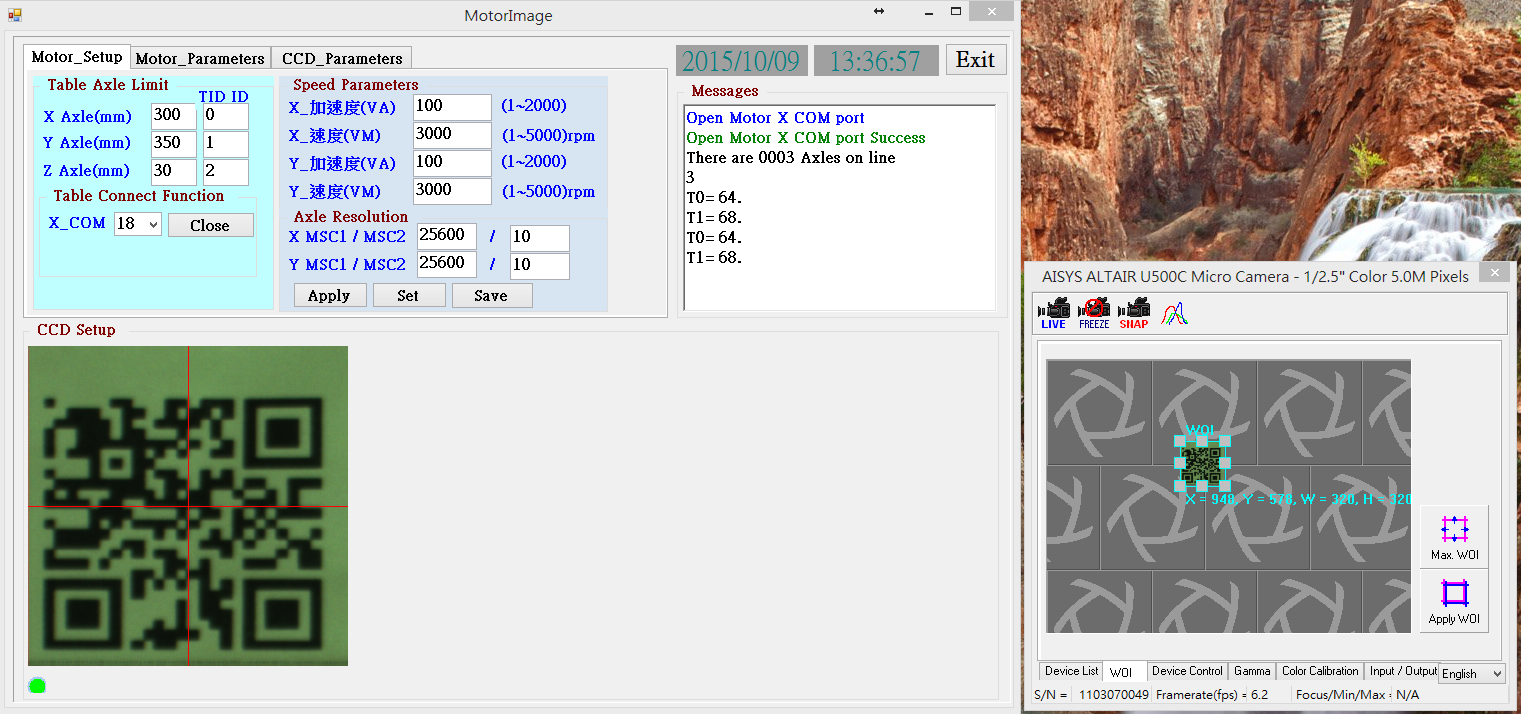
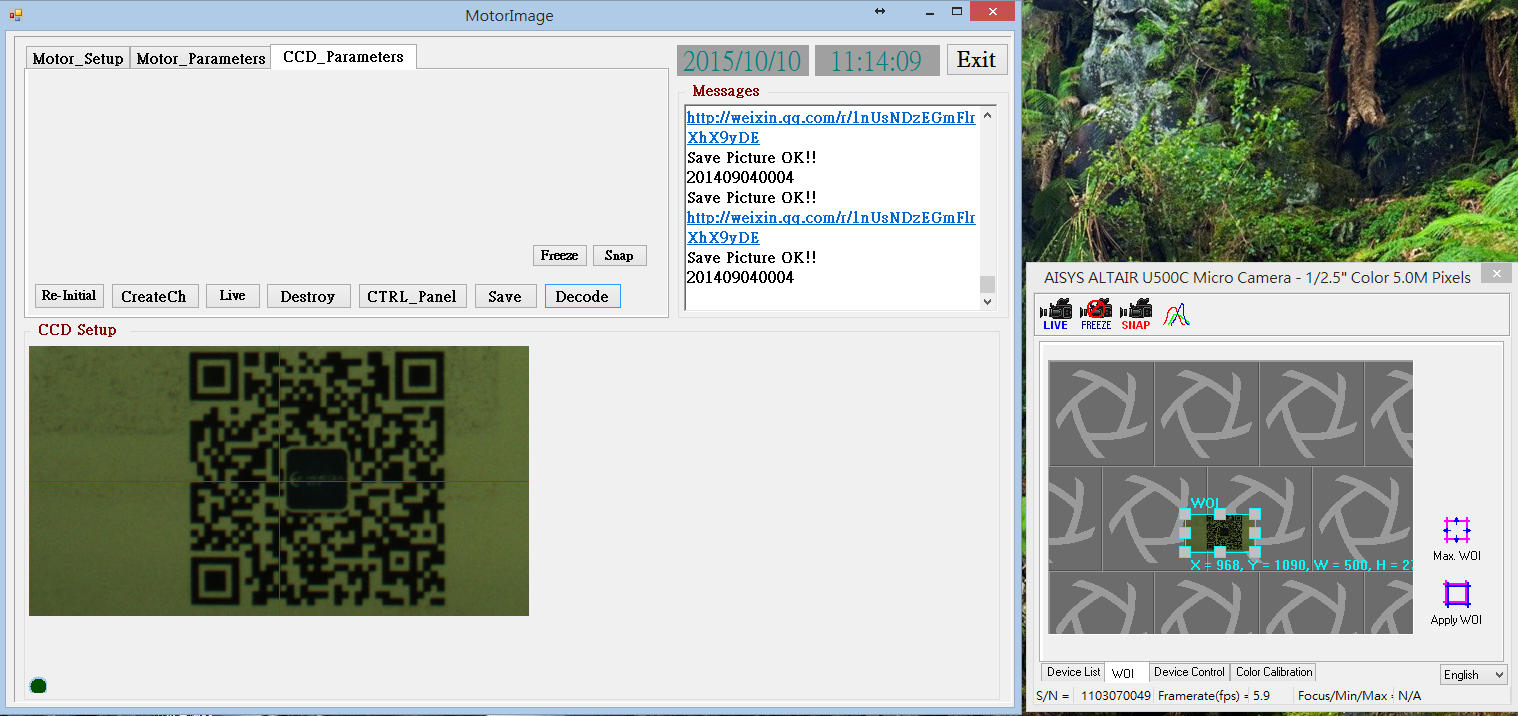
先架構XY軸作為移動的萬用治具, 在Z軸架設CCD作為解字解條碼之用
先將一些之前困擾我很久的馬達相關資料列出
1. 回復出廠值
「連點」CTRL + D 鍵的同時,開啟馬達電源 或者是 「連點」ESC
鍵的同時,開啟馬達電源。因為舊版本是 ESC鍵。
2. 更新馬達FW
這個動作是為了多顆馬達用RS485作連機使用, 確保馬達的FW一致連機才不會出錯

3. 馬達接線與參數設定
三顆馬達9pin頭內的1、6腳串接起來需使用隔離線(雙絞線)
主軸需拉2、3、5 腳出來(一個新的9PIN母頭)接電腦的RS232
參數設定就
主軸的TID=0
主軸的PN50=H7 (三軸的時候)
P.S:兩軸的話是=H3、四軸=H15
第二軸的TID=1
第三軸的TID=2
這樣就可以連線完成了
若要下指令給第二軸
就在指令前面加上T1
例如T1MA 100
以上這些數據都設定完成後, 就可以開始寫上位機的介面程式
我是用 Csharp 去做開發


運動設定部分設計有XY軸用comboBox 去選移動的距離配合圖形按鈕去做移動
另有一個可以下commands的Text 及控制output