Purpose:
Refer to the previous two articles (ESP32 Bluetooth Remote Control Car -DIY) and (ESP32 with HC-SR04 Ultrasonic Sensor)
You can build your own ESP32 based obstacle avoiding robot car. The car uses a servo mounted ultrasonic sensor to detect objects in front of and on either side of the car and an L298N DC motor driver shield to drive four geared motors, one on each wheel.
Download Libraryrobojax_L298N-DC-Motor_library
https://robojax.com/learn/arduino/robojax_L298N-DC-Motor_library.zip
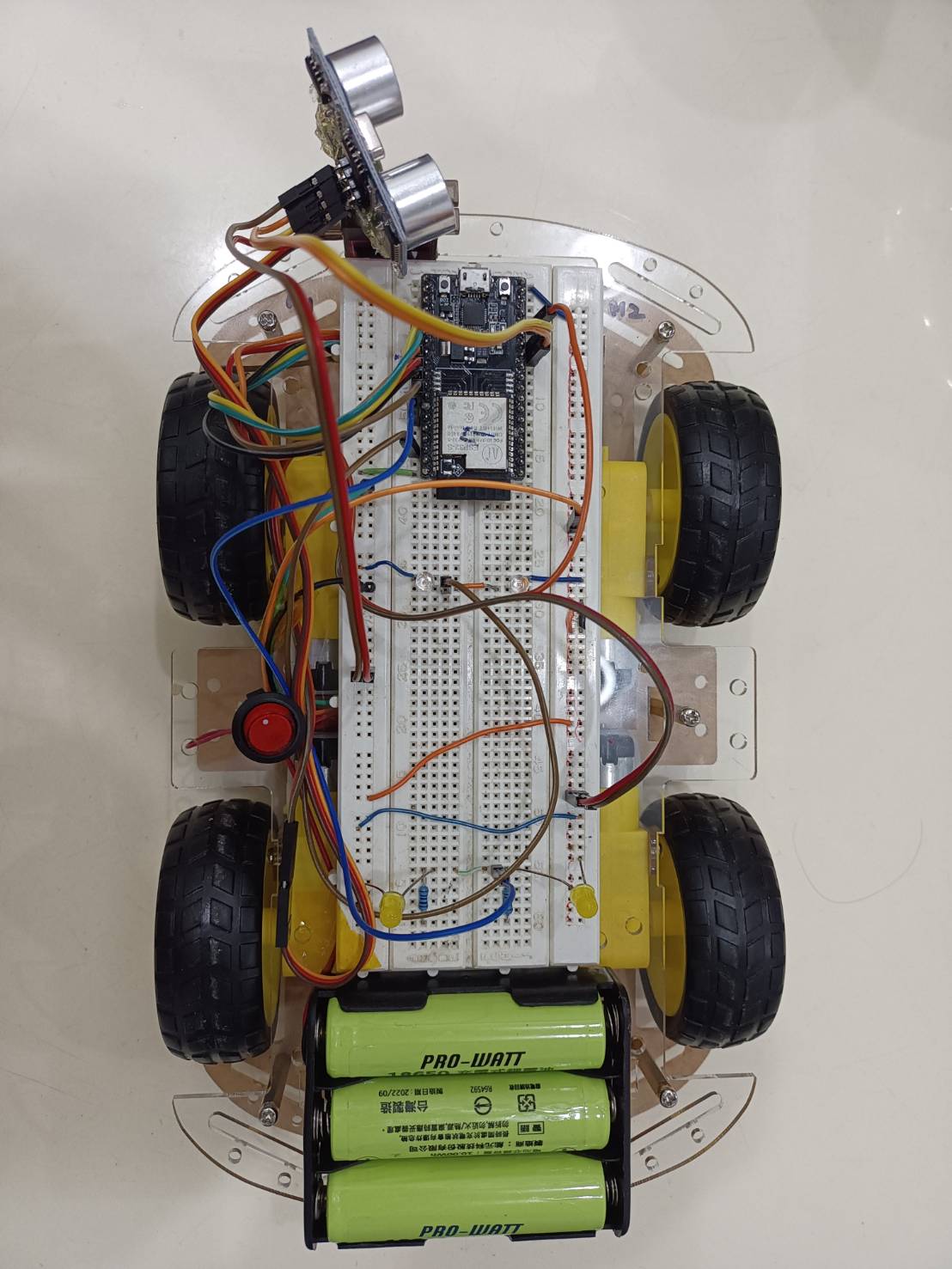

Circuit:

YouTubeDemo:
CodeIntroduce:
#include <Robojax_L298N_DC_motor.h>
#include <BluetoothSerial.h>
#include <ESP32Servo.h>
//--------- Flag structure --------------------------------------
typedef struct _vFlag
{
uint8_t BTFlag = 0;
uint8_t L298NFlag = 0;
uint8_t HCSR04Flag = 1;
uint8_t LEDFlag = 1;
uint8_t ServoFlag = 0;
uint8_t initial_Flag = 0;
uint8_t FunctionFlag = 0;
uint8_t back_light_Flag = 0;
uint8_t front_light_Flag = 0;
} vFlag;
vFlag *flag_Ptr;
vFlag flag;
//---------BT--------------------
BluetoothSerial SerialBT;
//---------------servo------------------------------
Servo myservo; // create servo object to control a servo
// Recommended PWM GPIO pins on the ESP32 include 2,4,12-19,21-23,25-27,32-33
#define servoPin 13
//------LED------------------
#define LED_BUILTIN 2
//-------------L298---------------------------------------------------
// motor 1 settings
#define CHA 0
#define ENA 4 // this pin must be PWM enabled pin if Arduino board is used
#define IN1 16
#define IN2 17
// motor 2 settings
#define IN3 18
#define IN4 19
#define ENB 5// this pin must be PWM enabled pin if Arduino board is used
#define CHB 1
const int CCW = 2; // do not change
const int CW = 1; // do not change
#define motor1 1 // do not change
#define motor2 2 // do not change
// for two motors without debug information // Watch video instruciton for this line: https://youtu.be/2JTMqURJTwg
Robojax_L298N_DC_motor motors(IN1, IN2, ENA, CHA, IN3, IN4, ENB, CHB);
//------Bluetooth RC Controller Define ----
#define back_light 21
#define front_light 22
//-----hcsr04 sensor------------------
#define TRIGPIN_PIN 12
#define ECHO_PIN 14
long duration;
unsigned long currentMillis = 0;
//----------global ------------------------
#define MAX_DISTANCE 200
#define MAX_SPEED 190 // Sets speed of DC motors
int speedSet = 0;
int distance = 60;
int distanceR = 0;
int distanceL = 0;
//--------- uart structure --------------------------------------
//----------uart--------------
#define LINE_BUFFER_LENGTH 64
typedef struct _vUart
{
char c;
int lineIndex = 0;
int line1Index = 0;
int BTlineIndex = 0;
bool lineIsComment;
bool lineSemiColon;
//char *line;
char line[128];
//char line1[128];
char BTline[20];
//char R_line[20];
//char L_line[20];
String inputString;
String BTinputString;
String S1inputString;
int V[16];
char ctemp[30];
char I2C_Data[80];
int DC_Spped = 50;
float Voltage[16];
int Buffer[128];
int StartCnt = 0;
int ReadCnt = 0;
int sensorValue = 0;
} vUart;
vUart *Uart_Ptr;
vUart Uart;
//-------------------------------------
TaskHandle_t huart;
TaskHandle_t hfunction;
void vUARTTask(void *pvParameters);
void vFunctionTask(void *pvParameters);
//------------------------------------------------------------------------------
void initial()
{
Serial.println(F("Create Task"));
//----------------------------------------------------------------------
xTaskCreatePinnedToCore(
vUARTTask, "UARTTask" // A name just for humans
,
1024 // This stack size can be checked & adjusted by reading the Stack Highwater
,
NULL, 3 // Priority, with 3 (configMAX_PRIORITIES - 1) being the highest, and 0 being the lowest.
,
&huart //handle
,
0);
xTaskCreatePinnedToCore(
vFunctionTask, "FunctionTask"
,
1024 // Stack size
,
NULL, 1 // Priority
,
&hfunction
,
1);
//----------------------------------------------------------------------
//----------------------------------------------------------------------
}
void Forward()
{
//motors.rotate(motor1, 60, CCW);
//motors.rotate(motor2, 60, CCW);
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
analogWrite(ENA, 100);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
analogWrite(ENB, 100);
}
void Reverse(){
//motors.rotate(motor2, 70, CW);
//motors.rotate(motor1, 70, CW);
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
analogWrite(ENA, 100);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
analogWrite(ENB, 100);
}
void Left()
{
//motors.rotate(motor1, 70, CW);
//motors.rotate(motor2, 70, CCW); //LF
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
analogWrite(ENA, 100);
}
void Right()
{
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
analogWrite(ENB, 100);
//motors.rotate(motor1, 70, CCW); //RF
//motors.rotate(motor2, 70, CW);
}
void Stop()
{
motors.brake(1);
motors.brake(2);
//myservo.detach();
}
//-------------------------------------------------
void setup()
{
Serial.begin(9600);
Serial.println(F("init"));
initial();
SerialBT.begin("BT_L298N");
myservo.setPeriodHertz(50);
myservo.attach(servoPin, 500, 2400);
pinMode(LED_BUILTIN, OUTPUT);
pinMode(TRIGPIN_PIN, OUTPUT);
pinMode(ECHO_PIN, INPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(ENA, OUTPUT);
pinMode(ENB, OUTPUT);
pinMode(back_light, OUTPUT);
pinMode(front_light, OUTPUT);
motors.begin();
myservo.write(90);
}
//-----------------------------------------
void loop()
{
Serial.print(F("Main at core:"));
Serial.println(xPortGetCoreID());
while(1)
{
if(flag.HCSR04Flag==1)
{
if(distance<=35)
{
Stop();
delay(200);
Reverse();
delay(400);
Stop();
delay(100);
flag.HCSR04Flag=2;
delay(2000);
flag.HCSR04Flag=3;
delay(2000);
flag.HCSR04Flag=1;
if ((distanceR >= distanceL) )
{
Left();
delay(700);
Stop();
delay(200);
flag.HCSR04Flag=1;
}
else
{
Right();
delay(700);
Stop();
delay(200);
flag.HCSR04Flag=1;
}
myservo.write(90);
delay(1000);
}
else
{
flag.HCSR04Flag=1;
Forward();
delay(100);
Stop();
delay(30);
}
}
vTaskDelay(1);
}
}
//----------------------------------------
void processCommand(char *data)
{
int len, xlen, ylen, zlen, alen;
int tempDIO;
String stemp;
len = Uart.inputString.length();
//---------------------------------------
if (strstr(data, "VER") != NULL)
{
Serial.println(F("ESP32_20230710"));
}
//-------------- HCSR04 --------------------
if (strstr(data, "HCSR04_ON") != NULL)
{
flag.HCSR04Flag = 1;
Serial.println(F("HCSR04_ON"));
}
if (strstr(data, "HCSR04_OFF") != NULL)
{
flag.HCSR04Flag = 0;
Serial.println(F("HCSR04_OFF"));
}
//----------------L298N-----------
if (strstr(data, "F") != NULL)
{
Serial.println(F("Forward"));
Forward();
//forward();
}
if (strstr(data, "L") != NULL)
{
Serial.println(F("Left"));
Left();
}
if (strstr(data, "R") != NULL)
{
Serial.println(F("Right"));
Right();
}
if (strstr(data, "B") != NULL)
{
Serial.println(F("Reverse"));
Reverse();
//backward();
}
if (strstr(data, "S") != NULL)
{
Serial.println(F("Stop"));
Stop();
}
//-----------------servo----------
//-------------- Servo --------------------
if (strstr(data, "SERVO_5")!= NULL)
{
Serial.println(F("SERVO_5"));
myservo.write(5);
//myservo.detach();
}
if (strstr(data, "SERVO_10")!= NULL)
{
Serial.println(F("SERVO_10"));
myservo.write(10);
}
if (strstr(data, "SERVO_20")!= NULL)
{
Serial.println(F("SERVO_20"));
myservo.write(20);
}
if (strstr(data, "SERVO_30")!= NULL)
{
Serial.println(F("SERVO_30"));
myservo.write(30);
}
if (strstr(data, "SERVO_50")!= NULL)
{
Serial.println(F("SERVO_50"));
myservo.write(50);
}
if (strstr(data, "SERVO_80")!= NULL)
{
Serial.println(F("SERVO_80"));
myservo.write(80);
}
if (strstr(data, "SERVO_90")!= NULL)
{
Serial.println(F("SERVO_90"));
myservo.write(90);
}
if (strstr(data, "SERVO_100")!= NULL)
{
Serial.println(F("SERVO_100"));
myservo.write(100);
}
if (strstr(data, "SERVO_120")!= NULL)
{
Serial.println(F("SERVO_120"));
myservo.write(120);
}
if (strstr(data, "SERVO_140")!= NULL)
{
Serial.println(F("SERVO_140"));
myservo.write(140);
}
if (strstr(data, "SERVO_150")!= NULL)
{
Serial.println(F("SERVO_150"));
myservo.write(150);
}
}
//-----------------------------------------
//-------------------BT-----------------
void BTprocessCommand(String data)
{
if (data =="FS")
{
Serial.println(F("Forward"));
Forward();
}
if (data == "LS")
{
Serial.println(F("Left"));
Left();
}
if (data == "RS")
{
Serial.println(F("Right"));
Right();
}
if (data == "BS")
{
Serial.println(F("Reverse"));
Reverse();
}
if (data == "S")
{
Serial.println(F("Stop"));
Stop();
}
if (data == "X")
{
flag.HCSR04Flag=0;
Serial.println(F("Stop"));
Stop();
flag.back_light_Flag=2;
flag.HCSR04Flag=0;
}
if (data == "x")
{
Serial.println(F("Stop"));
Stop();
flag.back_light_Flag=0;
flag.HCSR04Flag=1;
}
if (data == "FGFS")
{
//LF
motors.rotate(motor1, 60, CCW);
motors.rotate(motor2, 100, CCW);
}
if (data == "FIFS")
{
//RF
motors.rotate(motor1, 100, CCW);
motors.rotate(motor2, 60, CCW);
}
if (data == "BHBS")
{
//LB
motors.rotate(motor1, 60, CW);
motors.rotate(motor2, 100, CW);
}
if (data == "BJBS")
{
//RB
motors.rotate(motor1, 100, CW);
motors.rotate(motor2, 60, CW);
}
if (data == "U")
{
//backlight
digitalWrite(back_light, HIGH);
flag.back_light_Flag=1;
//Serial.println(F("light"));
}
if (data == "u")
{
//backlight
digitalWrite(back_light, LOW);
flag.back_light_Flag=0;
//Serial.println(F("lightoff"));
}
if (data == "W")
{
digitalWrite(front_light, HIGH);
flag.front_light_Flag=1;
//Serial.println(F("light"));
}
if (data == "w")
{
digitalWrite(front_light, LOW);
flag.front_light_Flag=0;
//Serial.println(F("lightoff"));
}
}
//-------------------------------------------
void vUARTTask(void *pvParameters)
{
(void)pvParameters;
Serial.print(F("UARTTask at core:"));
Serial.println(xPortGetCoreID());
for (;;)
{
while (Serial.available() > 0)
{
Uart.c = Serial.read();
if ((Uart.c == '\n') || (Uart.c == '\r'))
{ // End of line reached
if (Uart.lineIndex > 0)
{ // Line is complete. Then execute!
Uart.line[Uart.lineIndex] = '\0'; // Terminate string
//Serial.println( F("Debug") );
//Serial.println( Uart.inputString );
processCommand(Uart.line);
Uart.lineIndex = 0;
Uart.inputString = "";
}
else
{
// Empty or comment line. Skip block.
}
Uart.lineIsComment = false;
Uart.lineSemiColon = false;
Serial.println(F("ok>"));
}
else
{
//Serial.println( c );
if ((Uart.lineIsComment) || (Uart.lineSemiColon))
{
if (Uart.c == ')')
Uart.lineIsComment = false; // End of comment. Resume line.
}
else
{
if (Uart.c == '/')
{ // Block delete not supported. Ignore character.
}
else if (Uart.c == '~')
{ // Enable comments flag and ignore all characters until ')' or EOL.
Uart.lineIsComment = true;
}
else if (Uart.c == ';')
{
Uart.lineSemiColon = true;
}
else if (Uart.lineIndex >= LINE_BUFFER_LENGTH - 1)
{
Serial.println("ERROR - lineBuffer overflow");
Uart.lineIsComment = false;
Uart.lineSemiColon = false;
}
else if (Uart.c >= 'a' && Uart.c <= 'z')
{ // Upcase lowercase
Uart.line[Uart.lineIndex] = Uart.c - 'a' + 'A';
Uart.lineIndex = Uart.lineIndex + 1;
Uart.inputString += (char)(Uart.c - 'a' + 'A');
}
else
{
Uart.line[Uart.lineIndex] = Uart.c;
Uart.lineIndex = Uart.lineIndex + 1;
Uart.inputString += Uart.c;
}
}
}
} //while (Serial.available() > 0)
while (SerialBT.available())
{
flag.L298NFlag=1;
String BTdata = SerialBT.readString();
Stop();
Serial.println(BTdata);
BTprocessCommand(BTdata); // do something with the command
}//while (BT.available())
vTaskDelay(1);
}
}
void vFunctionTask(void *pvParameters)
{
(void)pvParameters;
Serial.print(F("FunctionTask at core:"));
Serial.println(xPortGetCoreID());
for (;;) // A Task shall never return or exit.
{
if(flag.HCSR04Flag==1)
{
currentMillis = millis();
myservo.write(90);
digitalWrite(TRIGPIN_PIN, LOW);
delayMicroseconds(2);
digitalWrite(TRIGPIN_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIGPIN_PIN, LOW);
duration= pulseIn(ECHO_PIN, HIGH);
distance= duration/29/2;
if (duration==0)
{
Serial.println("No pulse is from sensor");
}
else
{
Serial.print("Ultrasonic sensor is shown distance:");
Serial.print(distance);
Serial.println("cm");
Serial.print(distanceR-distanceL);
Serial.println("cm");
}
}
if(flag.HCSR04Flag==2) //lookRight
{
myservo.write(20);
digitalWrite(TRIGPIN_PIN, LOW);
delayMicroseconds(2);
digitalWrite(TRIGPIN_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIGPIN_PIN, LOW);
duration= pulseIn(ECHO_PIN, HIGH);
distanceR= duration/29/2;
if (duration==0)
{
Serial.println("No pulse is from sensor");
}
else
{
//Serial.print("Ultrasonic sensor is shown distanceR:");
//Serial.print(distanceR);
//Serial.println("cm");
}
}
if(flag.HCSR04Flag==3) //lookLeft
{
myservo.write(160);
digitalWrite(TRIGPIN_PIN, LOW);
delayMicroseconds(2);
digitalWrite(TRIGPIN_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIGPIN_PIN, LOW);
duration= pulseIn(ECHO_PIN, HIGH);
distanceL= duration/29/2;
if (duration==0)
{
Serial.println("No pulse is from sensor");
}
else
{
//Serial.print("Ultrasonic sensor is shown distanceL:");
//Serial.print(distanceL);
//Serial.println("cm");
}
}
vTaskDelay(1);
}
}
You haven't uploaded full circuit the switch part and it's connections are not there in circuit diagram can you provide it
回覆刪除Are you referring to the power switch part?
刪除